HOW A BRUSHLESS MOTOR WORKS
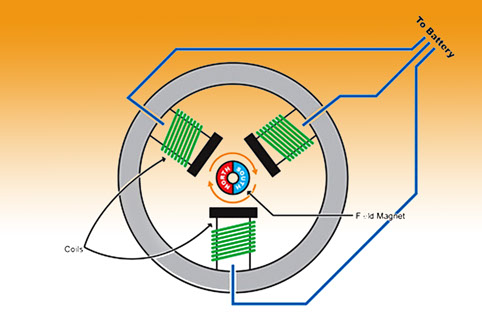
The basic explanation of a brushless motor's construction is that it is similar to a brushed motor, except everything is 'inside out' and there are no brushes at all. The permanent magnets that would wrap around the armature in a normal motor are instead placed around the motor shaft, and this assembly is called the rotor. The wire coils are around the inside of the motor can, making several different magnetic poles. In a sensored brushless motor, there are sensors on the rotor that send signals back to the electonic speed control.
Why brushless motors are so much more efficient than brushed motors
Other than the ball bearings the rotor spins on, there is no physical connection at all, automatically making the brushless motor more efficient and longer-lasting because there is no friction of the brushes and commutator. Having a computer control the rotation of the rotor also vastly increases efficiency. There's also no sparking from brushes to commutator so electrical interference is drastically reduced, and finally the coils are much easier to keep cool, boosting efficiency even further.
WHEN COST BECOMES AN ISSUE
With some applications a brushless motor system does present increased starting costs, however anyone familiar with maintaining high-power, heavily abused brushed motors will know that you'll quickly see considerable savings because you won't be replacing motor brushes, brush springs, armatures or whole motors...EVER!
WHAT IS THE TYPICAL PRICE DIFFERENCE BETWEEN STANDARD AND BRUSHLESS MOTORS
The cost of a typical brushed motor– dependent on application, could add up to over 15-25 % per unit. Add in the cost of a variety of other wear and tear parts and over time could reduce actual overall performance. While brushless motors really 'no maintenance'
They no longer have to deal with everything they used to do with their motors between every scheduled maintenance such as: motor removal, disassembly, comm trueing, brush swapping, re-assembly, break-in and finally re-installing...it adds up to quite a lot of time and money spent. The only possible need for maintenance are on well-used brushless motors that might need the bearings cleaned or changed. This is only ever rarely needed, however, so it shouldn't even be classified as regular maintenance work.
HOW A BRUSHED MOTOR WORKS
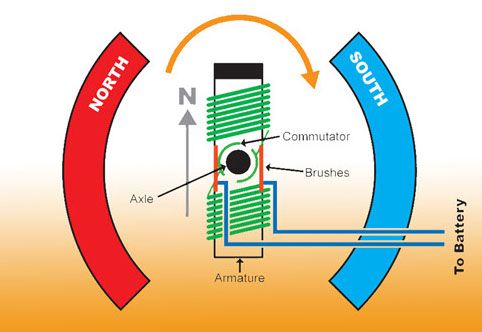
In a conventional RC electric motor you'll find two wires (positive and negative) that connect to specific points in the endbell of the motor, two curved permanent magnets inside the case or 'can' of the motor, and a spinning shaft with wires wrapped around it that goes down the centre of the motor can. The shaft and the wires together are known as the 'armature' of the motor, and at one end is where the motor pinion gear is attached - at the other end is a copper section, this is called the 'commutator'.
Touching the commutator to transfer electrical power to the armature are two 'brushes'. As you can see from the diagram above, two wires from the battery that bring power to the brushes, which physically contact the commutator, turning the armature into a basic electromagnet when electricity is applied.
HOW A STANDARD MOTOR SPINS
When an electromagnet has power applied to it, one end becomes the north 'pole' and the other becomes the south pole. Because the north pole of any magnet is automatically repelled from the north pole of another magnet, the motor armature will want to spin so its north pole is facing the south pole of the permanent curved magnets mounted inside the motor can. As the armature spins around to make the north/south poles meet, the electrical charge applied to the armature flips, so the poles are again repelled from each other and they make the armature spin, turning the pinion gear and your car or truck's transmission. Most electric motors have three poles instead of two - this prevents the battery from shorting out, lowering efficiency, and it also prevents the motor from getting stuck in one position.
STANDARD MOTORS REQUIREMENTS
The restrictions of brushed motors are made clear when you need to get huge amounts of power and speed from them. Because the brushes must remain in physical contact with the commutator at all times, there is significant friction from them, especially at high speeds. There is also significant electrical noise generated by the inefficient circuits, and the commutator and brushes eventually wear out, requiring replacement of parts of the motor, or the entire thing, however their cost is much more affordable.
SENSORLESS CONTROL
Apart from basic size and power differences, brushless motors are available in two main types: sensored and sensorless. Sensored motors use very small sensors on the rotor, plus an extra set of thin wires that connect the motor to a controller, in addition to the three thick wires that give the motor its power. The extra wires tell controller the position of the motor's armature as it spins, hundreds of times per second. This provides a huge amount of data to the controller, and takes this data and combines it with the input from the radio system to make the motor spin as smoothly and efficiently as possible. All this makes for a great system for top-level performance however it makes the controlled motors a bit more expensive and slightly harder to install and use.
A sensorless brushless system, doesn't have these sensors and extra wires, and the motor armature spins without relaying its exact precision back to the controller every milisecond. This makes the motor and controller easier to manufacture, simpler to install, easier to adjust and cheaper overall. A sensorless system provides the same amount of power as a sensored type, just with a tiny bit less precision.
> BACK